|
| | FD_LU () |
| | Constructor: empty. More...
|
| |
| | FD_LU (const FD_LU &dummy)=delete |
| | Broken copy constructor. More...
|
| |
| void | operator= (const FD_LU &)=delete |
| | Broken assignment operator. More...
|
| |
| void | solve (Problem *const &problem_pt, DoubleVector &result) |
| |
| void | solve (DoubleMatrixBase *const &matrix_pt, const DoubleVector &rhs, DoubleVector &result) |
| |
| void | solve (DoubleMatrixBase *const &matrix_pt, const Vector< double > &rhs, Vector< double > &result) |
| |
| | DenseLU () |
| | Constructor, initialise storage. More...
|
| |
| | DenseLU (const DenseLU &dummy)=delete |
| | Broken copy constructor. More...
|
| |
| void | operator= (const DenseLU &)=delete |
| | Broken assignment operator. More...
|
| |
| | ~DenseLU () |
| | Destructor, clean up the stored LU factors. More...
|
| |
| double | jacobian_setup_time () const |
| |
| virtual double | linear_solver_solution_time () const |
| |
| | LinearSolver () |
| | Empty constructor, initialise the member data. More...
|
| |
| | LinearSolver (const LinearSolver &dummy)=delete |
| | Broken copy constructor. More...
|
| |
| void | operator= (const LinearSolver &)=delete |
| | Broken assignment operator. More...
|
| |
| virtual | ~LinearSolver () |
| | Empty virtual destructor. More...
|
| |
| void | enable_doc_time () |
| | Enable documentation of solve times. More...
|
| |
| void | disable_doc_time () |
| | Disable documentation of solve times. More...
|
| |
| bool | is_doc_time_enabled () const |
| | Is documentation of solve times enabled? More...
|
| |
| bool | is_resolve_enabled () const |
| | Boolean flag indicating if resolves are enabled. More...
|
| |
| virtual void | enable_resolve () |
| |
| virtual void | disable_resolve () |
| |
| virtual void | solve_transpose (Problem *const &problem_pt, DoubleVector &result) |
| |
| virtual void | solve_transpose (DoubleMatrixBase *const &matrix_pt, const DoubleVector &rhs, DoubleVector &result) |
| |
| virtual void | solve_transpose (DoubleMatrixBase *const &matrix_pt, const Vector< double > &rhs, Vector< double > &result) |
| |
| virtual void | resolve (const DoubleVector &rhs, DoubleVector &result) |
| |
| virtual void | resolve_transpose (const DoubleVector &rhs, DoubleVector &result) |
| |
| virtual void | enable_computation_of_gradient () |
| |
| void | disable_computation_of_gradient () |
| |
| void | reset_gradient () |
| |
| void | get_gradient (DoubleVector &gradient) |
| | function to access the gradient, provided it has been computed More...
|
| |
| | DistributableLinearAlgebraObject () |
| | Default constructor - create a distribution. More...
|
| |
| | DistributableLinearAlgebraObject (const DistributableLinearAlgebraObject &matrix)=delete |
| | Broken copy constructor. More...
|
| |
| void | operator= (const DistributableLinearAlgebraObject &)=delete |
| | Broken assignment operator. More...
|
| |
| virtual | ~DistributableLinearAlgebraObject () |
| | Destructor. More...
|
| |
| LinearAlgebraDistribution * | distribution_pt () const |
| | access to the LinearAlgebraDistribution More...
|
| |
| unsigned | nrow () const |
| | access function to the number of global rows. More...
|
| |
| unsigned | nrow_local () const |
| | access function for the num of local rows on this processor. More...
|
| |
| unsigned | nrow_local (const unsigned &p) const |
| | access function for the num of local rows on this processor. More...
|
| |
| unsigned | first_row () const |
| | access function for the first row on this processor More...
|
| |
| unsigned | first_row (const unsigned &p) const |
| | access function for the first row on this processor More...
|
| |
| bool | distributed () const |
| | distribution is serial or distributed More...
|
| |
| bool | distribution_built () const |
| |
| void | build_distribution (const LinearAlgebraDistribution *const dist_pt) |
| |
| void | build_distribution (const LinearAlgebraDistribution &dist) |
| |
Dense LU decomposition-based solve of linear system assembled via finite differencing of the residuals Vector. Even more inefficient than DenseLU but excellent sanity check!
Solver: Takes pointer to problem and returns the results Vector which contains the solution of the linear system defined by the problem's residual Vector (Jacobian computed by FD approx.)
Solver: Takes pointer to problem and returns the results Vector which contains the solution of the linear system defined by the problem's residual Vector. (Jacobian assembled by FD).
Reimplemented from oomph::DenseLU.
578 clock_t t_start = clock();
585 if (result.distributed())
587 std::ostringstream error_message_stream;
588 error_message_stream <<
"The result vector must not be distributed";
589 throw OomphLibError(error_message_stream.str(),
597 unsigned long n_dof = problem_pt->ndof();
605 clock_t t_start = clock();
608 problem_pt->get_fd_jacobian(residuals, jacobian);
611 clock_t t_end = clock();
618 <<
"CPU for setup of Dense Jacobian: "
627 solve(&jacobian, residuals, result);
633 clock_t t_end = clock();
634 double total_time =
double(t_end - t_start) / CLOCKS_PER_SEC;
637 oomph_info <<
"CPU for FD DenseLU LinearSolver: "
double Jacobian_setup_time
Jacobian setup time.
Definition: linear_solver.h:408
friend class DenseDoubleMatrix
The DenseDoubleMatrix class is a friend.
Definition: linear_solver.h:336
int Sign_of_determinant_of_matrix
Definition: linear_solver.h:415
void solve(Problem *const &problem_pt, DoubleVector &result)
Definition: linear_solver.cc:575
bool Doc_time
Boolean flag that indicates whether the time taken.
Definition: linear_solver.h:77
std::string convert_secs_to_formatted_string(const double &time_in_sec)
Definition: oomph_utilities.cc:1316
OomphInfo oomph_info
Definition: oomph_definitions.cc:319
#define OOMPH_EXCEPTION_LOCATION
Definition: oomph_definitions.h:61
#define OOMPH_CURRENT_FUNCTION
Definition: oomph_definitions.h:86
References oomph::DoubleVector::built(), oomph::TimingHelpers::convert_secs_to_formatted_string(), oomph::DistributableLinearAlgebraObject::distributed(), oomph::LinearSolver::Doc_time, oomph::Problem::get_fd_jacobian(), oomph::DenseLU::Jacobian_setup_time, oomph::Problem::ndof(), OOMPH_CURRENT_FUNCTION, OOMPH_EXCEPTION_LOCATION, oomph::oomph_info, oomph::DenseLU::Sign_of_determinant_of_matrix, and oomph::Problem::sign_of_jacobian().
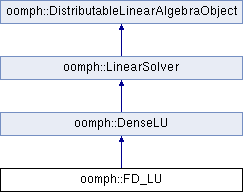
 Inheritance diagram for oomph::FD_LU:
Inheritance diagram for oomph::FD_LU: