|
|
|
|
Use AxisymmetricIntersectionOfWalls to Screw Screw::read Screw::read Screw::read define axisymmetric walls, such as cylinders, cones, etc. More...
#include <AxisymmetricIntersectionOfWalls.h>
 Inheritance diagram for AxisymmetricIntersectionOfWalls:
Inheritance diagram for AxisymmetricIntersectionOfWalls:Public Member Functions | |
| AxisymmetricIntersectionOfWalls () | |
| Default constructor. More... | |
| AxisymmetricIntersectionOfWalls (const AxisymmetricIntersectionOfWalls &p) | |
| Copy constructor. More... | |
| AxisymmetricIntersectionOfWalls (Vec3D position, Vec3D normal, std::vector< normalAndPosition > walls, const ParticleSpecies *species) | |
| Constructor setting values. More... | |
| ~AxisymmetricIntersectionOfWalls () override | |
| Destructor. More... | |
| AxisymmetricIntersectionOfWalls & | operator= (const AxisymmetricIntersectionOfWalls &other) |
| Copy assignment operator. More... | |
| AxisymmetricIntersectionOfWalls * | copy () const final |
| Wall copy method. It calls the copy constructor of this Wall, useful for polymorphism. More... | |
| bool | getDistanceAndNormal (const BaseParticle &P, Mdouble &distance, Vec3D &normal_return) const final |
| Computes the distance from the wall for a given BaseParticle and returns true if there is a collision. If there is a collision, also return the normal vector. More... | |
| void | read (std::istream &is) final |
| reads wall More... | |
| void | write (std::ostream &os) const final |
| outputs wall More... | |
| std::string | getName () const final |
| Returns the name of the object. More... | |
| void | setAxis (Vec3D a) |
| void | convertLimits (Vec3D &min, Vec3D &max) const |
| void | writeVTK (VTKContainer &vtk) const override |
| void | writeVTK (VTKContainer &vtk, Vec3D min, Vec3D max) const |
| const std::vector< Mdouble > & | getDisplayedSegments () const |
| Gets the displayed segments. More... | |
| void | setDisplayedSegments (const std::vector< Mdouble > &displayedSegments) |
| Sets the displayed segments. More... | |
| Public Member Functions inherited from IntersectionOfWalls | |
| IntersectionOfWalls () | |
| Default constructor. More... | |
| IntersectionOfWalls (const IntersectionOfWalls &other) | |
| Copy constructor. More... | |
| IntersectionOfWalls (const std::vector< normalAndPosition > &walls, const ParticleSpecies *species) | |
| Constructor setting values. More... | |
| ~IntersectionOfWalls () override | |
| Destructor. More... | |
| IntersectionOfWalls & | operator= (const IntersectionOfWalls &other) |
| IntersectionOfWalls * | copy () const override |
| Wall copy method. It calls the copy constructor of this Wall, useful for polymorphism. More... | |
| void | clear () |
| Removes all parts of the walls. More... | |
| void | setSpecies (const ParticleSpecies *species) |
| sets species of subwalls as well More... | |
| void | setHandler (WallHandler *wallHandler) override |
| A function which sets the WallHandler for this BaseWall. More... | |
| unsigned int | getNumberOfObjects () |
| Returns the number of objects. More... | |
| void | addObject (Vec3D normal, Vec3D point) |
| Adds a wall to the set of infinite walls, given a normal vector pointing into the wall (i.e. out of the simulation domain), going through the point, so that normal*x=normal*point. More... | |
| void | addObject (Quaternion orientation, Vec3D position) |
| void | add3PointObject (Vec3D PointA, Vec3D PointB, Vec3D PointC) |
| void | setPointsAndLines (unsigned int n) |
| void | addTetraSTL (Vec3D PointA, Vec3D PointB, Vec3D PointC, Vec3D WallNormal, Mdouble Thickness, int wallidentifier) |
| constructs a tetrahedron for an STL file input More... | |
| void | addTetra (const Vec3D &PointA, const Vec3D &PointB, const Vec3D &PointC, Mdouble &Thickness) |
| constructs a tetrahedron from 3 input coordinates More... | |
| void | addPlate (const Vec3D &PointA, const Vec3D &PointB, const Vec3D &PointC, const Vec3D &WallNormal, const Mdouble &Thickness, int wallidentifier) |
| MERCURYDPM_DEPRECATED void | addObject (Vec3D normal, Mdouble position) |
| Adds a wall to the set of finite walls, given an normal vector pointing into the wall (i.e. out of the flow domain), to give a plane defined by normal*x=position. More... | |
| void | createOpenPrism (std::vector< Vec3D > points, Vec3D prismAxis) |
| Creates an open prism which is a polygon between the points, except the first and last point, and extends infinitely in the PrismAxis direction. Note that if you view from inside of your geometry, the shape formed by points has to be convex, otherwise it will not create the wall correctly. More... | |
| void | createPrism (std::vector< Vec3D > points, Vec3D prismAxis) |
| Creates an open prism which is a polygon between the points and extends infinitely in the PrismAxis direction. Note that if you view from inside of your geometry, the shape formed by points has to be convex, otherwise it will not create the wall correctly. More... | |
| void | createOpenPrism (std::vector< Vec3D > points) |
| Creates an open prism which is a polygon between the points, except the first and last point, and extends infinitely in the direction perpendicular to the first and second wall. Note that if you view from inside of your geometry, the shape formed by points has to be convex, otherwise it will not create the wall correctly. More... | |
| void | createPrism (std::vector< Vec3D > points) |
| Creates an open prism which is a polygon between the points and extends infinitely in the direction perpendicular to the first and second wall. Note that if you view from inside of your geometry, the shape formed by points has to be convex, otherwise it will not create the wall correctly. More... | |
| bool | getDistanceAndNormal (const BaseParticle &p, Mdouble &distance, Vec3D &normal_return) const override |
| Compute the distance from the wall for a given BaseParticle and return if there is a collision. If there is a collision, also return the normal vector. More... | |
| bool | getDistanceAndNormal (const Vec3D &position, Mdouble wallInteractionRadius, Mdouble &distance, Vec3D &normal_return) const |
| Compute the distance from the wall for a given BaseParticle and return if there is an interaction. If there is an interaction, also return the normal vector. More... | |
| void | read (std::istream &is) override |
| Move the IntersectionOfWalls to a new position, which is a Vec3D from the old position. More... | |
| void | write (std::ostream &os) const override |
| Writes an IntersectionOfWalls to an output stream, for example a restart file. More... | |
| std::string | getName () const override |
| Returns the name of the object, here the string "IntersectionOfWalls". More... | |
| void | writeVTK (VTKContainer &vtk) const override |
| Public Member Functions inherited from BaseWall | |
| BaseWall () | |
| Default constructor. More... | |
| BaseWall (const BaseWall &w) | |
| Copy constructor. More... | |
| ~BaseWall () override | |
| Default destructor. More... | |
| virtual bool | getDistanceNormalOverlap (const BaseParticle &P, Mdouble &distance, Vec3D &normal_return, Mdouble &overlap) const |
| virtual bool | getDistanceNormalOverlapSuperquadric (const SuperQuadricParticle &p, Mdouble &distance, Vec3D &normal_return, Mdouble &overlap) const |
| virtual Vec3D | getFurthestPointSuperQuadric (const Vec3D &normalBodyFixed, const Vec3D &axes, Mdouble eps1, Mdouble eps2) const |
| WallHandler * | getHandler () const |
| A function which returns the WallHandler that handles this BaseWall. More... | |
| void | setIndSpecies (unsigned int indSpecies) override |
| Define the species of this wall using the index of the species in the SpeciesHandler in this DPMBase. More... | |
| void | setSpecies (const ParticleSpecies *species) |
| Defines the species of the current wall. More... | |
| bool | isFixed () const override |
| void | setForceControl (Vec3D forceGoal, Vec3D gainFactor, Vec3D baseVelocity={0, 0, 0}) |
| Slowly adjusts the force on a wall towards a specified goal, by adjusting (prescribing) the velocity of the wall. More... | |
| virtual bool | isLocal (Vec3D &min, Vec3D &max) const |
| bool | getLinePlaneIntersect (Vec3D &intersect, const Vec3D &p0, const Vec3D &p1, const Vec3D &n, const Vec3D &p) |
| bool | isInsideWallVTK (const Vec3D &point, const Vec3D &normal, const Vec3D &position) const |
| void | projectOntoWallVTK (Vec3D &point0, const Vec3D &point1, const Vec3D &normal, const Vec3D &position) const |
| void | intersectVTK (std::vector< Vec3D > &points, Vec3D normal, Vec3D position) const |
| virtual BaseInteraction * | getInteractionWithSuperQuad (SuperQuadricParticle *p, unsigned timeStamp, InteractionHandler *interactionHandler) |
| void | getVTK (std::vector< Vec3D > &points, std::vector< std::vector< double >> &triangleStrips) |
| const Vec3D | getAxis () const |
| BaseInteraction * | getInteractionWith (BaseParticle *p, unsigned timeStamp, InteractionHandler *interactionHandler) override |
| Returns the interaction between this wall and a given particle, nullptr if there is no interaction. More... | |
| virtual void | actionsOnRestart () |
| No implementation but can be overidden in its derived classes. More... | |
| virtual void | actionsAfterParticleGhostUpdate () |
| No implementation but can be overidden in its derived classes. More... | |
| virtual void | handleParticleAddition (unsigned int id, BaseParticle *p) |
| Handles the addition of particles to the particleHandler. More... | |
| virtual void | handleParticleRemoval (unsigned int id) |
| Handles the addition of particles to the particleHandler. More... | |
| virtual void | checkInteractions (InteractionHandler *interactionHandler, unsigned int timeStamp) |
| Check if all interactions are valid. More... | |
| bool | getVTKVisibility () const |
| void | setVTKVisibility (bool vtkVisibility) |
| void | addRenderedWall (BaseWall *w) |
| BaseWall * | getRenderedWall (size_t i) const |
| std::vector< BaseWall * > | getRenderedWalls () const |
| void | removeRenderedWalls () |
| void | renderWall (VTKContainer &vtk) |
| void | addParticlesAtWall (unsigned numElements=50) |
| void | setVelocityControl (Vec3D forceGoal, Vec3D gainFactor, Vec3D baseVelocity) |
| virtual void | writeWallDetailsVTK (VTKData &data) const |
| virtual void | computeWear () |
| Public Member Functions inherited from BaseInteractable | |
| BaseInteractable () | |
| Default BaseInteractable constructor. More... | |
| BaseInteractable (const BaseInteractable &p) | |
| Copy constructor. More... | |
| ~BaseInteractable () override | |
| Destructor, it simply destructs the BaseInteractable and all the objects it contains. More... | |
| unsigned int | getIndSpecies () const |
| Returns the index of the species associated with the interactable object. More... | |
| const ParticleSpecies * | getSpecies () const |
| Returns a pointer to the species of this BaseInteractable. More... | |
| void | setSpecies (const ParticleSpecies *species) |
| Sets the species of this BaseInteractable. More... | |
| const Vec3D & | getForce () const |
| Returns the force on this BaseInteractable. More... | |
| const Vec3D & | getTorque () const |
| Returns the torque on this BaseInteractable. More... | |
| void | setForce (const Vec3D &force) |
| Sets the force on this BaseInteractable. More... | |
| void | setTorque (const Vec3D &torque) |
| Sets the torque on this BaseInteractable. More... | |
| void | addForce (const Vec3D &addForce) |
| Adds an amount to the force on this BaseInteractable. More... | |
| void | addTorque (const Vec3D &addTorque) |
| Adds an amount to the torque on this BaseInteractable. More... | |
| virtual void | resetForceTorque (int numberOfOMPthreads) |
| void | sumForceTorqueOMP () |
| const Vec3D & | getPosition () const |
| Returns the position of this BaseInteractable. More... | |
| const Quaternion & | getOrientation () const |
| Returns the orientation of this BaseInteractable. More... | |
| virtual void | setPosition (const Vec3D &position) |
| Sets the position of this BaseInteractable. More... | |
| void | setOrientationViaNormal (Vec3D normal) |
| Sets the orientation of this BaseInteractable by defining the vector that results from the rotation of the (1,0,0) vector. More... | |
| void | setOrientationViaEuler (Vec3D eulerAngle) |
| Sets the orientation of this BaseInteractable by defining the euler angles. More... | |
| virtual void | setOrientation (const Quaternion &orientation) |
| Sets the orientation of this BaseInteractable. More... | |
| virtual void | move (const Vec3D &move) |
| Moves this BaseInteractable by adding an amount to the position. More... | |
| virtual void | rotate (const Vec3D &angularVelocityDt) |
| Rotates this BaseInteractable. More... | |
| const std::vector< BaseInteraction * > & | getInteractions () const |
| Returns a list of interactions which belong to this interactable. More... | |
| void | addInteraction (BaseInteraction *I) |
| Adds an interaction to this BaseInteractable. More... | |
| bool | removeInteraction (BaseInteraction *I) |
| Removes an interaction from this BaseInteractable. More... | |
| void | copyInteractionsForPeriodicParticles (const BaseInteractable &p) |
| Copies interactions to this BaseInteractable whenever a periodic copy made. More... | |
| void | setVelocity (const Vec3D &velocity) |
| set the velocity of the BaseInteractable. More... | |
| void | setAngularVelocity (const Vec3D &angularVelocity) |
| set the angular velocity of the BaseInteractble. More... | |
| void | addVelocity (const Vec3D &velocity) |
| adds an increment to the velocity. More... | |
| void | addAngularVelocity (const Vec3D &angularVelocity) |
| add an increment to the angular velocity. More... | |
| virtual const Vec3D & | getVelocity () const |
| Returns the velocity of this interactable. More... | |
| virtual const Vec3D & | getAngularVelocity () const |
| Returns the angular velocity of this interactable. More... | |
| void | setPrescribedPosition (const std::function< Vec3D(double)> &prescribedPosition) |
| Allows the position of an infinite mass interactable to be prescribed. More... | |
| void | applyPrescribedPosition (double time) |
| Computes the position from the user defined prescribed position function. More... | |
| void | setPrescribedVelocity (const std::function< Vec3D(double)> &prescribedVelocity) |
| Allows the velocity of an infinite mass interactable to be prescribed. More... | |
| void | applyPrescribedVelocity (double time) |
| Computes the velocity from the user defined prescribed velocity function. More... | |
| void | setPrescribedOrientation (const std::function< Quaternion(double)> &prescribedOrientation) |
| Allows the orientation of the infinite mass interactbale to be prescribed. More... | |
| void | applyPrescribedOrientation (double time) |
| Computes the orientation from the user defined prescribed orientation function. More... | |
| void | setPrescribedAngularVelocity (const std::function< Vec3D(double)> &prescribedAngularVelocity) |
| Allows the angular velocity of the infinite mass interactable to be prescribed. More... | |
| void | applyPrescribedAngularVelocity (double time) |
| Computes the angular velocity from the user defined prescribed angular velocity. More... | |
| virtual const Vec3D | getVelocityAtContact (const Vec3D &contact) const |
| Returns the velocity at the contact point, use by many force laws. More... | |
| void | integrateBeforeForceComputation (double time, double timeStep) |
| This is part of integrate routine for objects with infinite mass. More... | |
| void | integrateAfterForceComputation (double time, double timeStep) |
| This is part of the integration routine for objects with infinite mass. More... | |
| virtual Mdouble | getInvMass () const |
| virtual Mdouble | getCurvature (const Vec3D &labFixedCoordinates) const |
| virtual bool | isFaceContact (const Vec3D &normal) const |
| Public Member Functions inherited from BaseObject | |
| BaseObject ()=default | |
| Default constructor. More... | |
| BaseObject (const BaseObject &p)=default | |
| Copy constructor, copies all the objects BaseObject contains. More... | |
| virtual | ~BaseObject ()=default |
| virtual destructor More... | |
| virtual void | moveInHandler (unsigned int index) |
| Except that it is virtual, it does the same thing as setIndex() does. More... | |
| void | setIndex (unsigned int index) |
| Allows one to assign an index to an object in the handler/container. More... | |
| void | setId (unsigned long id) |
| Assigns a unique identifier to each object in the handler (container) which remains constant even after the object is deleted from the container/handler. More... | |
| unsigned int | getIndex () const |
| Returns the index of the object in the handler. More... | |
| unsigned int | getId () const |
| Returns the unique identifier of any particular object. More... | |
| void | setGroupId (unsigned groupId) |
| unsigned | getGroupId () const |
Private Attributes | |
| std::vector< Mdouble > | displayedSegments_ |
| The starting end ending points of segments that are displayed in VTK. More... | |
Additional Inherited Members | |
| Static Public Member Functions inherited from BaseWall | |
| static void | addToVTK (const std::vector< Vec3D > &points, VTKContainer &vtk) |
| Takes the points provided and adds a triangle strip connecting these points to the vtk container. More... | |
| Protected Attributes inherited from IntersectionOfWalls | |
| std::vector< InfiniteWall > | wallObjects_ |
| The wall "segments"/directions that together make up the finite wall. More... | |
| std::vector< Vec3D > | C_ |
| A vector that stores the intersection point of three different InfiniteWall. More... | |
Use AxisymmetricIntersectionOfWalls to Screw Screw::read Screw::read Screw::read define axisymmetric walls, such as cylinders, cones, etc.
An AxisymmetricIntersectionOfWalls is equivalent to an IntersectionOfWalls where the Cartesian coordinate system (x,y,z) is replaced by a cylindrical coordinate system \((\hat{r},\theta,\hat{z})\). The origin and orientation of the cylindrical coordinate system is defined by the position and orientation of the wall, respectively.
In other words, a particle touches an AxisymmetricIntersectionOfWalls, if it touches the IntersectionOfWalls object in the \((r,\theta,z)\) coordinate system.
Thus, you need to define:
Say you want to define a cylindrical wall as in the left image below. If you define the origin and orientation of the cylindrical coordinate system as *(0,0,0)* and *(0,0,1)*, respectively, then the cylinder is a rectangle in the cylindrical coordinate system. Thus, you need to intersect three walls, with normals and position as indicated in the right figure below.
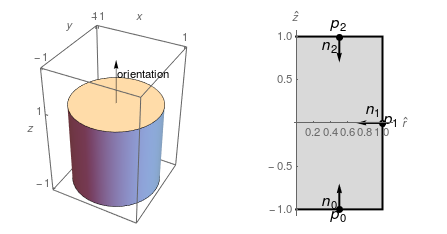
The following code defines such a cylinder:
Note, one can also define a cylindric casing that can be filled with particles, see image below.
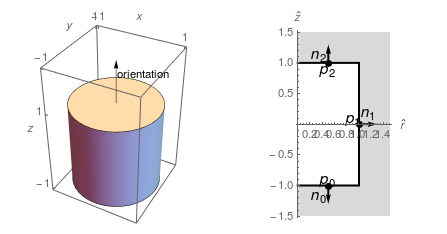
In this case, you don't have to intersect the walls; instead you need to create three separate walls. A sample code:
Say you want a cylindrical casing with an outflow at the base. In this case, you need to define three walls:
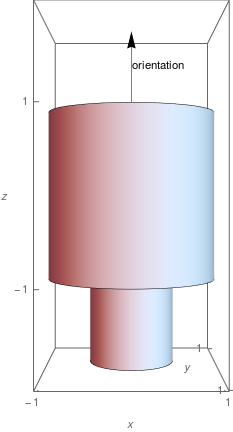
This can be done as follows:
For a demonstration on how to use this class, see Flow through a 3D hourglass/silo.
| AxisymmetricIntersectionOfWalls::AxisymmetricIntersectionOfWalls | ( | ) |
Default constructor.
Referenced by copy().
| AxisymmetricIntersectionOfWalls::AxisymmetricIntersectionOfWalls | ( | const AxisymmetricIntersectionOfWalls & | other | ) |
Copy constructor.
| [in] | other | The AxisymmetricIntersectionOfWalls that must be copied. |
References DEBUG, displayedSegments_, and logger.
| AxisymmetricIntersectionOfWalls::AxisymmetricIntersectionOfWalls | ( | Vec3D | position, |
| Vec3D | normal, | ||
| std::vector< normalAndPosition > | walls, | ||
| const ParticleSpecies * | species | ||
| ) |
Constructor setting values.
References BaseInteractable::setOrientationViaNormal(), and BaseInteractable::setPosition().
|
override |
converts XYZ limits into RZ limits, to properly limit the VTK plotting area.
References BaseInteractable::getOrientation(), BaseInteractable::getPosition(), max, min, Eigen::numext::q, UniformPSDSelfTest::r, sqrt(), Vec3D::X, Vec3D::Y, and Vec3D::Z.
Referenced by writeVTK().
|
finalvirtual |
Wall copy method. It calls the copy constructor of this Wall, useful for polymorphism.
Implements BaseWall.
References AxisymmetricIntersectionOfWalls().
Referenced by operator=().
|
inline |
Gets the displayed segments.
References displayedSegments_.
|
finalvirtual |
Computes the distance from the wall for a given BaseParticle and returns true if there is a collision. If there is a collision, also return the normal vector.
First, the particle is translated by the vector position_, then the distance normal and tangential to the orientation is computed. This normal and tangential direction is interpreted as the x and z coordinate. With the particle shifted into the XZ plane, the distance and normal is computed, as if the AxisymmetricIntersectionOfWalls would be a simple IntersectionOfWalls. Finally, the object and the normal is rotated back to the original position.
See also AxisymmetricIntersectionOfWalls for details.
Implements BaseWall.
References a, Vec3D::dot(), Quaternion::getAxis(), IntersectionOfWalls::getDistanceAndNormal(), BaseObject::getIndex(), Vec3D::getLength(), BaseInteractable::getOrientation(), BaseInteractable::getPosition(), logger, WallFunction::normal(), p, UniformPSDSelfTest::r, and WARN.
|
finalvirtual |
Returns the name of the object.
Implements BaseObject.
| AxisymmetricIntersectionOfWalls & AxisymmetricIntersectionOfWalls::operator= | ( | const AxisymmetricIntersectionOfWalls & | other | ) |
Copy assignment operator.
| [in] | other | The AxisymmetricIntersectionOfWalls that must be copied. |
References copy().
|
finalvirtual |
reads wall
| [in] | is | The input stream from which the AxisymmetricIntersectionOfWalls is read, usually a restart file. |
Reimplemented from BaseInteractable.
References displayedSegments_, i, IntersectionOfWalls::read(), and helpers::readOptionalVariable().
| void AxisymmetricIntersectionOfWalls::setAxis | ( | Vec3D | a | ) |
References a, and BaseInteractable::setOrientationViaNormal().
Referenced by NautaMixer::addScrew(), GranuDrum::GranuDrum(), GranuHeap::GranuHeap(), RotatingDrumBidisperseInitialise::RotatingDrumBidisperseInitialise(), AxisymmetricHopper::setupInitialConditions(), RotatingDrumWet::setupInitialConditions(), VerticalMixer::setupInitialConditions(), HourGlass::setupInitialConditions(), Drum::setupInitialConditions(), Silo::setupInitialConditions(), UnionOfWalls::setupInitialConditions(), Tutorial11::setupInitialConditions(), and FullRestartTest::setupInitialConditions().
|
inline |
Sets the displayed segments.
The array of displayed segments consists of 2*n values, where n is the number of segments. For each segment, the starting and ending points are stored in the array. Each value corresponds to a distance from the walls' position in the direction of the normal vector.
E.g. if two segments from z=-0.2 to -0.1 and from z=0.1 to 0.2 are displayed, the array would be displayedSegments = {-0.2, -0.1, 0.1, 0.2}.
References displayedSegments_, and logger.
Referenced by HourGlass::setupInitialConditions(), and Tutorial11::setupInitialConditions().
|
finalvirtual |
outputs wall
| [in] | os | The output stream where the AxisymmetricIntersectionOfWalls must be written to, usually a restart file. |
Reimplemented from BaseInteractable.
References displayedSegments_, and IntersectionOfWalls::write().
|
overridevirtual |
adds extra information to the points and triangleStrips vectors needed to plot the wall in vtk format
| points | Coordinates of the vertices of the triangulated surfaces (in the VTK file this is called POINTS) |
| triangleStrips | Indices of three vertices forming one triangulated surface (in the VTK file this is called CELL) |
Reimplemented from BaseWall.
References convertLimits(), displayedSegments_, BaseHandler< T >::getDPMBase(), BaseWall::getHandler(), DPMBase::getMax(), DPMBase::getMin(), max, min, and Vec3D::Z.
| void AxisymmetricIntersectionOfWalls::writeVTK | ( | VTKContainer & | vtk, |
| Vec3D | min, | ||
| Vec3D | max | ||
| ) | const |
References Jeffery_Solution::angle(), cos(), BaseInteractable::getOrientation(), BaseInteractable::getPosition(), BaseWall::intersectVTK(), max, min, Mesh_Parameters::nz, p, constants::pi, VTKContainer::points, Quaternion::rotate(), sin(), VTKContainer::triangleStrips, IntersectionOfWalls::wallObjects_, X, xy, XY, and Y.
|
private |
The starting end ending points of segments that are displayed in VTK.
This variable influence only the display of the wall in VTK, and has no effect on the physics of the wall.
Referenced by AxisymmetricIntersectionOfWalls(), getDisplayedSegments(), read(), setDisplayedSegments(), write(), and writeVTK().